
 个人中心
个人中心 个人信息
个人信息 我的项目
我的项目 创业通介绍
创业通介绍采用LPLM模型的多模态切割方法,全面提升了分割挑战中的鲁棒性和完整性。
获得三项国际冠军
nuScenes lidar semantic segmentation
ScanNetV2 3D Object Detection
Road Estimation Evaluation
The following article is from 有鹿具身智能大脑实验室 Author 鹿人甲
专业设备和机器人的通用具身智能大脑
今天跟大家分享来自元璟人工智能领域投后项目“有鹿机器人”的前沿技术进展。
有鹿即将发布的 LPLM 2.4版本,在国际人工智能顶级竞赛上为中国拿下8个冠军。并在多个项目中以绝对领先的分数打败了NVIDIA,Google、Meta(Facebook)、三星等海外科技巨头!
我们祝贺有鹿!并与大家分享相关技术进展的细节。

有鹿的全系产品会在25年Q1收到该版本的OTA!
LPLM模型为何领先?
目前机器人的技术路线主要分为GPS定位算法和SLAM定位算法两类。而有鹿采用端到端大模型的思路,这不仅能更好的解决传统算法的定位导航与紧急避障等问题,还可以实现动态博弈式的三维空间路径规划与控制,更可以让机器人理解物理世界和语言世界的关系,让机器人进入通用机器人时代。
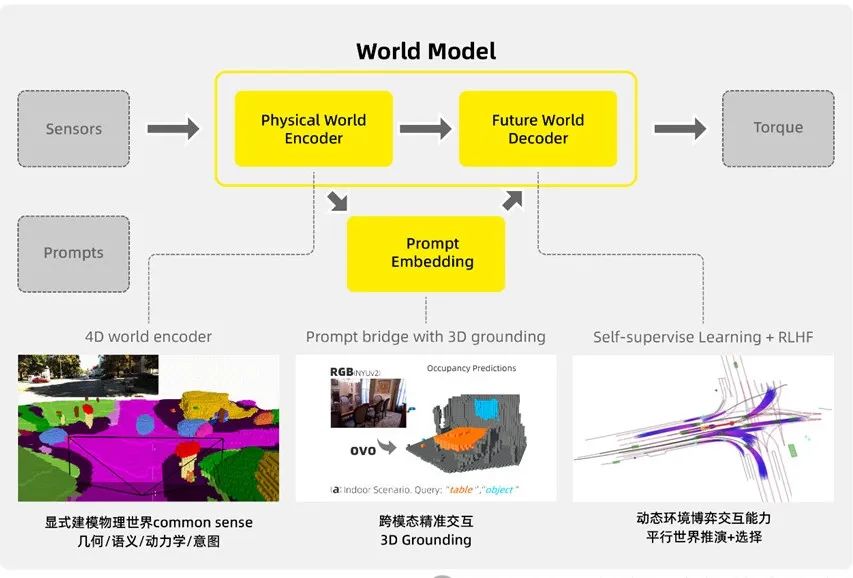
有鹿创新式的设计了“三维纹理占用网格序列即语义“的tokenizaer技术,并采用超级标签对齐技术,突破性的创造了一种描述物理世界的语言体系,称之为 Large physics language model,简称 LPLM 模型。

采用LPLM模型的多模态切割方法,全面提升了分割挑战中的鲁棒性和完整性。
获得三项国际冠军
nuScenes lidar semantic segmentation
ScanNetV2 3D Object Detection
Road Estimation Evaluation
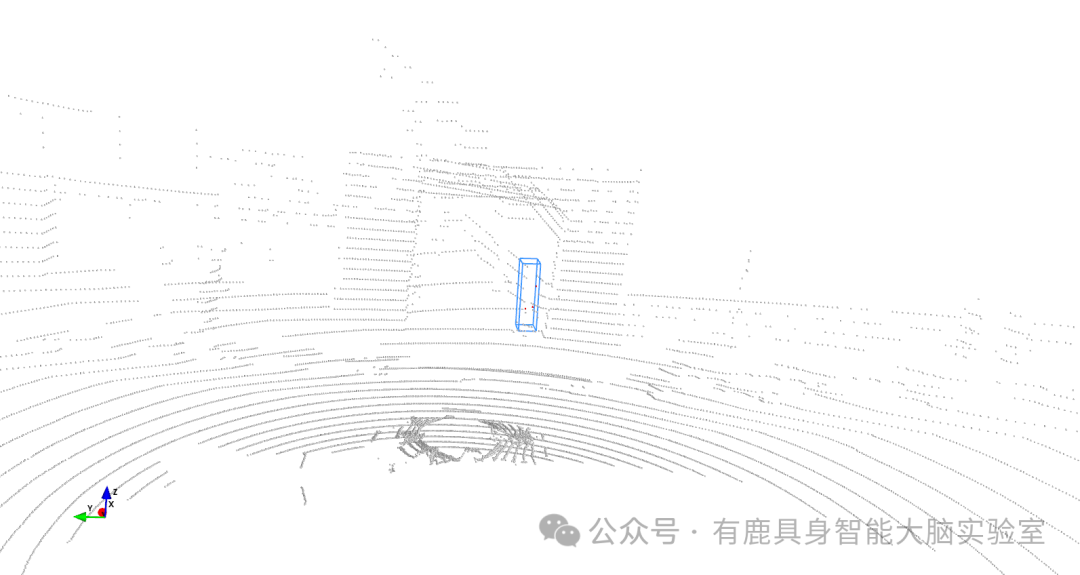
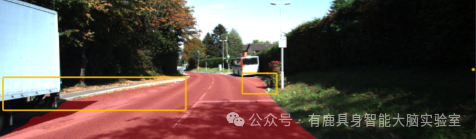
在如下室外场景中,点云图中的锥桶实际上上只打到几个点,如果单纯依赖点云召回是非常困难的,在有鹿的模型里加入图像后,在点云图中可以容易找回来(红点显示)。

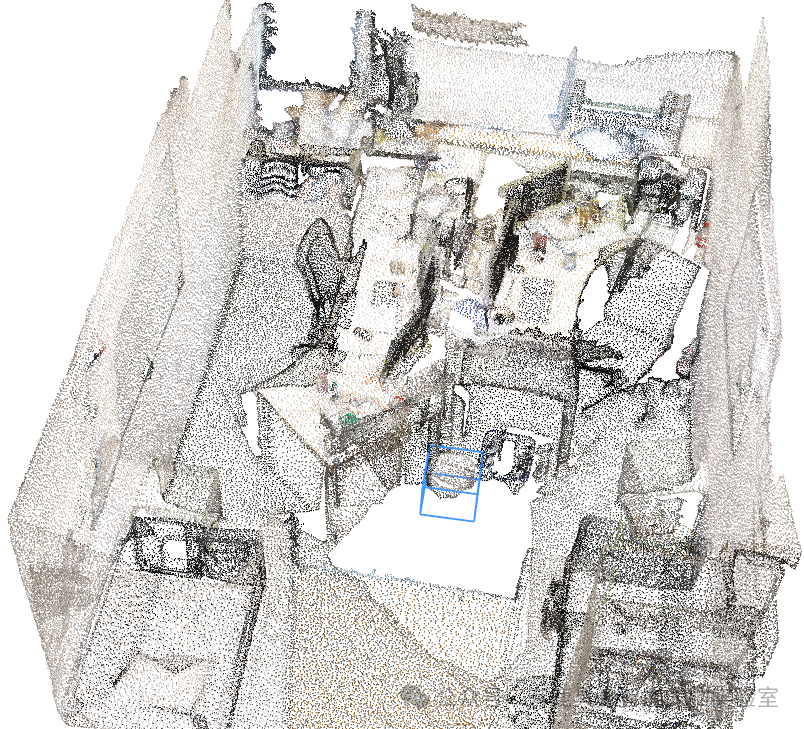
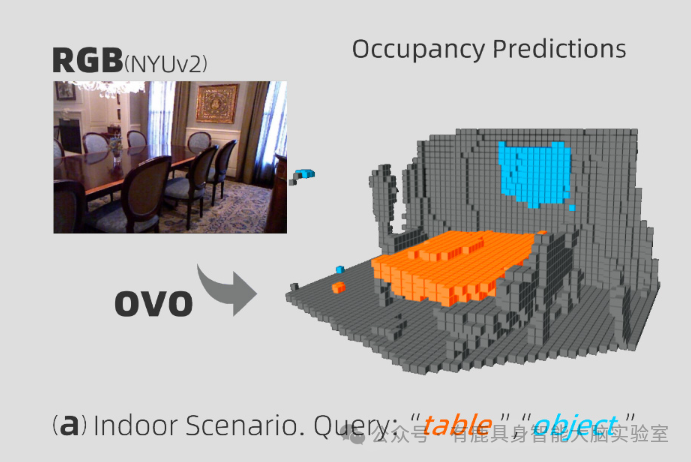
在如下室内场景中,图所示的垃圾桶属于长尾类别,在3d空间下较难识别,但是借助预训练好的2d视觉encoder可以轻松识别。

采用LPLM模型的三维纹理占用网格技术,丰富了传感器的感知内容和表达能力,创造出了“完美传感器”,使得感知识别效果有了质的提升。
获得四项国际冠军
KITTI Instance Sementation
KITTI Depth Completion
KITTI Road Estimation
Argoverse 2 2024 Scene Flow Challenge
效果如下图所示:上面是PLARD方法,下面是有鹿的方法。在前后两辆车的停车区域,都正确识别了道路分割,在实际应用中对于机器人(例如扫地机)的贴边工作有更精准的效果。
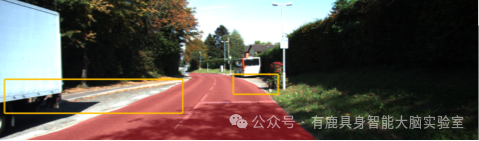
同样的,在拥挤的窄道,可以提升过窄道的能力,同时因为稳定的检测边缘能力,降低机器人过窄道时因为传感器抖动造成的卡停现象。


LPLM模型本质就是一种物理世界描述语言,天然具备出色prompt和3D grounding的能力。
获得以下国际冠军
Talk2car Referring expression comprehension
你好,我是AI助理
可以解答问题、推荐解决方案等

评论